



Figure 1: The close cooperation between Vector Informatik and AbsInt paves the way for autonomous driving. Image rights: Vector Informatik GmbH
A key requirement for autonomous driving and x-by-wire systems is the correct timing of fail-operational systems. Coordinated software tools and close cooperation between Vector and AbsInt make it easier for ECU developers to analyze the Worst-Case Execution Time (WCET) of projects based on MICROSAR from Vector. This proves that the timing behavior of autonomous driving systems meets the strict safety standards and requirements.
The collaboration between Vector and AbsInt brings together the expertise of two industry leaders in the field of safety-related embedded systems. The partners attune Vector’s safety-certified MICROSAR platforms with AbsInt’s rock-solid timing analysis tools. In this way, developers create predictable systems that fulfill significant fail-operational requirements.
Figure 2: The correct timing behavior of the system is a basic requirement for functional safety and thus for autonomous driving. Image rights: Vector Informatik GmbH
With the advent of “hands-off” autonomous driving, vehicle control is shifted to autonomous systems within specified scenarios. During active driving, these systems need to adhere to very strict functional safety and timing requirements. It is essential to have precise knowledge of the upper bound on a function’s runtime, also referred to as Worst-Case Execution Time (WCET). This is crucial for proving safety-related availability. Determining the WCET is a notable challenge and typically requires significant effort. By joining forces, Vector and AbsInt enable easier analysis of systems where timing is absolutely crucial to functional safety.
Fail-operational systems are systems that must continue to operate even in the presence of single faults or failures, such as autonomous driving or x-by-wire systems. These use cases require a high degree of safety, reliability, and availability, as well as predictable and deterministic behavior.
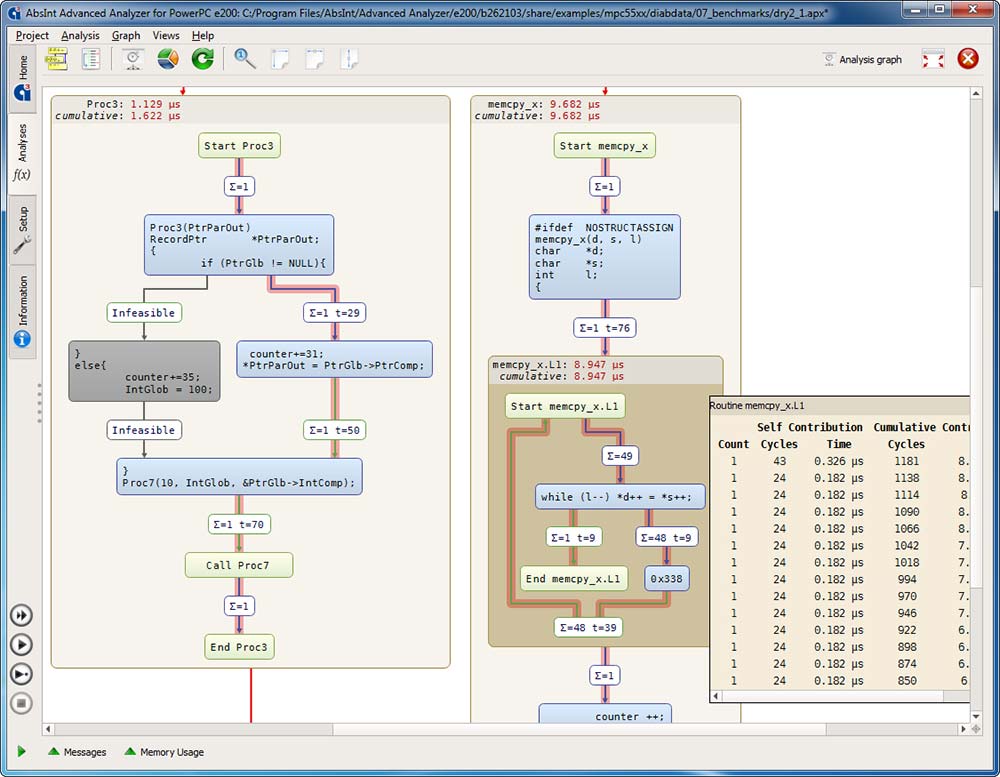
Figure 3: Interprocedural control flow graph with WCET analysis results. The exact determination of the upper limit for the runtime of a function is essential for the development of autonomous driving functions. Image rights: AbsInt Angewandte Informatik GmbH
Vector’s MICROSAR platforms offer a state-of-the-art solution for developing fail-operational systems. Based on the AUTOSAR standard and with additional extensions, they support the realization of adaptive and scalable software architectures. AbsInt’s timing analysis tools enhance Vector’s solution by providing rigorous and certified methods for determining the worst-case execution time of the software functions – a crucial factor for ensuring the proper timing behavior of the system and avoiding timing faults.
„Our collaboration with AbsInt is essential to enable Worst-Case Execution Time (WCET) analysis of complex automotive software. Together, we’re shaping the future of fail-operational systems, ensuring safety in autonomous driving”, says Dr. Falco Bapp, Manager Solution Management at Vector.
“Good analysis precision requires a precise understanding of the underlying Vector software, which we obtain through our cooperation. Our joint customers benefit of many years of close cooperation”, adds Dr. Christian Ferdinand, Managing Director of AbsInt.
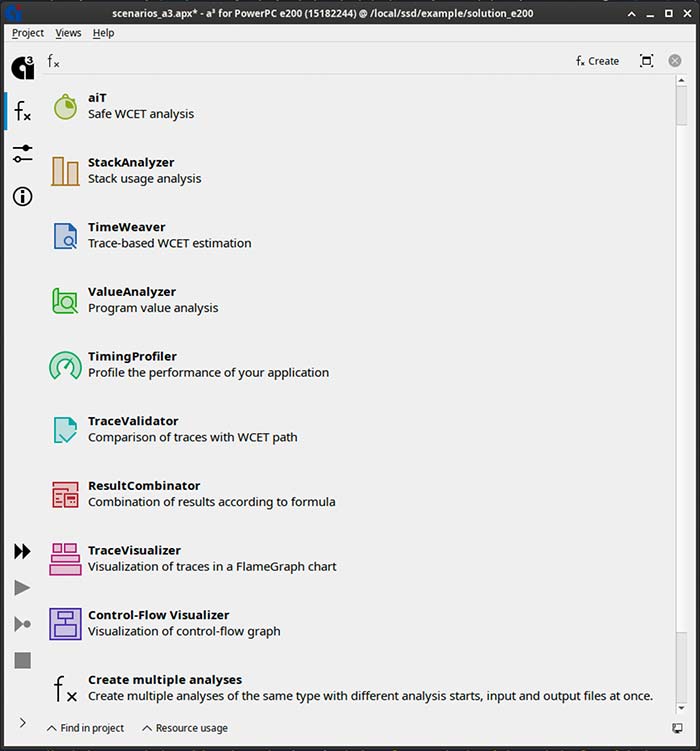
Figure 4: AbsInt’s timing analysis tools provide precise and certified methods for determining the worst-case execution time. Image rights: AbsInt Angewandte Informatik GmbH
Furthermore, Vector’s TA Tool Suite and AbsInt’s timing analysis tools complement each other to provide a full timing toolchain for determining timing behavior throughout all project lifecycle phases.
More Information on MICROSAR: www.vector.com/microsar
More Information on AbsInt’s timing analysis tools: www.absint.com