


So, whether it is a robot arm in a factory, a robotically-guided vehicle or something akin to the robots anticipated by science fiction, with arms, legs and animated faces, it is the precision with which the control feedback loop operates that will deliver the sylphlike movement and positioning accuracy needed for today’s demanding applications. In turn this precision depends on a network of sensors to detect tilt, rotation, acceleration, shock, vibration and proximity. Advances in sensors based on micro- electromechanical system (MEMS technology now provide solutions to all these requirements.
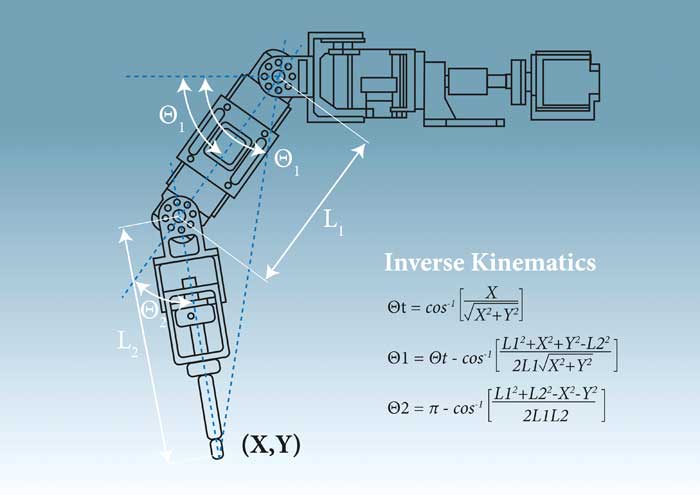
Figure 1: Tilt angle calculations required for positioning a robot arm.
Accelerometers Measure Tilt
Tilt is generally understood to be a measurement of angle relative to a reference plane or axis, as in the tilt of the Earth. In robotics, tilt is used to determine the position of a robotic arm. This can either be in a two-axis plane, with a rotation measurement providing any third axis position information that may be required, or implemented as a full 3-axis measurement.
Where tilt angles are measured directly, e.g. at the joints of a robot arm (as shown in Figure 1), instructing the robot to move the tip of its arm to the desired X-Y coordinates requires use of complex inverse kinematics equations to calculate the signals needed to drive the joint motors to achieve that position. Accelerometers provide an alternative approach to measuring tilt, where these sensors determine a change in direction of the acceleration due to gravity. This feature will be familiar to anyone who has a smartphone that incorporates low-g MEMS sensors to change the phone’s screen orientation when it is rotated. This works fine provided the robot arm is only subject to the static acceleration due to gravity (i.e. within a range of ±1g) and not affected by the arm hitting an object or coming to the limit of its travel, which could result in a larger signal.
For simple tilt sensing in two dimensions, a 2-axis accelerometer can be used to provide pitch and roll detection. However, this is only really suited to applications where the X-Y operating plane is parallel to the Earth’s surface, i.e. perpendicular to the force of gravity, otherwise the tilt measurement sensitivity is reduced.
3-axis accelerometers, such as the ADXL345, from Analog Device Inc. (ADI) avoid this limitation and can provide a full three-dimensional tilt-sensing solution. While this device offers resolutions of ±2g, ±4g, ±8g, and ±16g, for tilt-sensing, it is advisable to use the ±2g range, as this provides the highest accuracy when measuring tilt acceleration due to gravity, which is ±1g (or half of its 13-bit range).
Gyroscopes Measure Rotation
Rotation or angular motion occurs in robotics when an arm or other tool, such as a drill or screwdriver, rotates around a single axis. Measurement of rotation may also complement dual axis tilt measurement to provide full three-dimensional positioning and can also overcome a limitation of 3 axis accelerometers, encountered when the rotation is around the Z-axis that is perpendicular to the Earth. In this situation, there is no movement in the X-Y plane so these axes will measure 0g, while the Z-axis will continue to measure the full gravitational force of 1g so there will be no change in accelerometer readings.
A MEMS gyroscope is a type of sensor specifically designed to sense rotation by measuring the movement of a very small micro-machined mass moving within the rotating sensor (see Figure 2) due to the Coriolis Effect.
Gyroscopes are characterized by their range and sensitivity so it is important to select a device with the right specification for a given application. Its range is the fastest rotational speed, in °/sec, that can accurately be measured. Sensitivity is the output change, in mV, at a given speed and is measured inmV/°/sec. The 16-bit resolution FXAS21002C from NXP is a yaw, pitch and roll angular rate gyroscope with an adjustable full-scale dynamic range covering ±250°/s to ±2000°/s. This compact (24-lead QFN package), low-power (2.7 mA in active mode) device can measure angular rates of up to ±2000°/s, with output data rates reaching 800Hz. An angular rate sensitivity of 0.0625°/s is supported when at ±2000°/s. Its integrated low pass filter allows the host application to limit the digital signal bandwidth. Both I2C and SPI interfaces are featured.
STMicroelectronics’ 16-bit I3G4250D 3-axis digital output gyroscope exhibits strong stability at zero-rate level and maintains consistent sensitivity over temperature and time. Users can select the full scale that best matches their specific needs – ±245/±500/±2000°/s. As well as the sensing element, the device also incorporates all the necessary sensor interface technology. Measured angular rate is supplied through its SPI interface (with an I2C interface option also available). An operational temperature range spanning -40°C to +85°C is supported.
Using its proprietary iSensor technology, the ADIS16266BCCZ from ADI has an extensive 360Hz bandwidth. This device can be used to measure high speed rotational movement through its ±14,000°/s full scale performance. It has automatic and manual bias correction controls.
Accelerometers Also Measure Shock
In considering accelerometers for tilt measurement, it was noted that tilt measurements assume no other acceleration due to shock, such as the rapid deceleration that would be experienced by a moving robot arm suddenly brought to a halt by hitting another object. Such a shock can clearly be detected with ease via an accelerometer, but will most likely exceed the ±1g range of a tilt accelerometer, depending on where the accelerometer is located, i.e. it would be higher for a sensor at the end of a robot arm than one close to its body.
Another difference in the operation required from accelerometers used to detect shock rather than measure tilt is that they need to respond quickly. In the same way that the accelerometer in the hard drive of a laptop computer needs to park the drive head within milliseconds to avoid damage to the surface of the disc, the accelerometer used to detect shock in a robotic system needs to rapidly flag an issue to prevent potential damage to the robot or its immediate environment or, worse still, injury to a person.
For this reason, the location of this accelerometer needs to be carefully chosen and its output needs to be critically monitored to ensure priority action.
Using MEMS Sensors to Detect Vibration
The detection of vibration in any machinery is often a matter of reliability and safety since generally vibration is undesirable and is most likely a symptom failing components or poor maintenance. For industrial robots, monitoring vibration may be necessary to ensure safe continued operation and, in the extreme, used to implement a safety shutdown routine. MEMS-based vibration sensors with embedded RF transceivers can provide a highly effective sensing solution via which to monitor and record vibration in industrial environments.
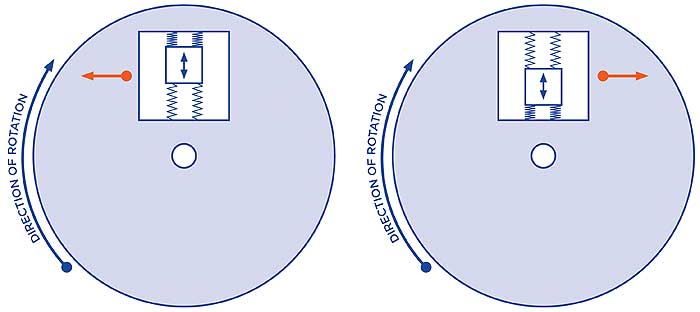
Figure 2: The operation a MEMS gyroscope sensor (courtesy of Analog Devices).
Surprisingly Accelerometers Also Measure Acceleration!
The smooth motion of robots or robotic arms involves acceleration and deceleration, i.e. the gradual increase and decrease in speed (especially starting from or returning to rest).
A dedicated MEMS accelerometer can be used to precisely detect and control this behaviour ensuring that a robot can accurately approach and pick up an object and then put it down carefully in exactly the right place without damage. Robots that can pick up and move raw eggs without dropping or crushing them demonstrate this capability.
Where a robot comes under the influence of external forces the ability to detect excessive acceleration or deceleration can also be vital to ensuring safe operation.
Sensor Fusion
As MEMS becomes more commonplace in sensing systems, the opportunities for employment of sensor fusion are set to increase. Capturing data simultaneously from numerous different sensors (e.g. accelerometers, gyroscopes, magnetometers, pressure sensors, etc.), accompanied by appropriate digital filtering algorithms, will allow engineers to mitigate the shortfalls that any particular sensor type exhibits when taken in isolation. This will lead to improvements in operational performance (in terms of accuracy, linearity, responsiveness and resolution) being derived, while also combatting the issue of sensor drift. In addition, reductions in the bill-of-materials costs, overall power consumption and the space that needs to be allocated may potentially be benefited from too.
In robotics, the combination of 3-axis accelerometer and 3-axis gyroscope sensing functions means that precise measurements of the angular velocity data can be acquired when the system is moving and the tilt angle can be determined with a high degree of accuracy when the system is still. Merging this data together will allow a comprehensive overview of the robot’s motion (covering pitch, roll, yaw, etc.).
Conclusion
Robotics applications have become ever more demanding and the clunky, almost comical actions of yesterday’s robotic systems are no longer acceptable. Smooth and precise operation that balances strength, delicacy and versatility is now mandated- – and this requires advanced sensors to provide the necessary feedback for refined and safe control. MEMS technology offers the way forward, with accelerometers and gyroscopes able to measure tilt, rotation, vibration and acceleration. Through application of such devices it will be possible to improved system performance and ensure ongoing operational reliability, while also markedly reducing the costs involved.

Author: Mark Patrick
Mark joined Mouser Electronics in July 2014 having previously held senior marketing roles at RS Components. Prior to RS, Mark spent 8 years at Texas Instruments in Applications Support and Technical Sales roles and holds a first class Honours Degree in Electronic Engineering from Coventry University.
Mouser Electronics
www.mouser.com