


 Motor selection is critical for efficiency.They are a power-hungry but essential part of our daily lives and are found everywhere from small residential uses, such as household appliances and tools, through electric cars and trains in the transportation sector, right up to the largest industrial motors for offshore oil rigs and damns.
Motor selection is critical for efficiency.They are a power-hungry but essential part of our daily lives and are found everywhere from small residential uses, such as household appliances and tools, through electric cars and trains in the transportation sector, right up to the largest industrial motors for offshore oil rigs and damns.
Motor selection is critical for efficiency.They are a power-hungry but essential part of our daily lives and are found everywhere from small residential uses, such as household appliances and tools, through electric cars and trains in the transportation sector, right up to the largest industrial motors for offshore oil rigs and damns.
Around the world, governments have been putting increasing legislative measures into place to reduce energy consumption for some years and these are only set to increase further. In addition, consumers in a retail sense are far smarter and look for low energy-consuming products routinely; the same is true for industrial customers looking to invest in more efficient equipment.
In addition to minimizing power usage, engineers are also challenged with squeezing motors, drives and their controllers into increasingly smaller dimensions. A washing machine that features a larger drum capacity offers a value-adding selling point to the customer, but it still needs to fit within standard dimensions. Reducing space for electronic components creates thermal management issues which pose further design challenges for engineers. Adding cooling mechanisms will only increase power consumption, so the motors themselves need to be engineered with improved efficiency levels so less heat is generated in the first place.
Motor Types
Electric motors basically use magnetism to create motion. There are two main categories of motors: AC (alternating current) and DC (direct current).
DC motors were the first to be invented and are still the simplest form of motors. DC motors are driven by passing a flow of current through a conductor inside a magnetic field to produce rotating torque. Main types of DC motors are Brushed DC and Brushless DC, with brushed motors generating power by connecting opposite poles of a power source to deliver negative and positive charges to the commutator when it makes physical contact with the brushes.
Brushed DC Motors
Faulhaber Series DC Geared Motors
RS Stock # 873-4830
Mfr. Part # 1016M012G+10/1 256:1
 Faulhaber Coreless Technology series brushed DC gearmotors with a precision planetary gearhead.
Faulhaber Coreless Technology series brushed DC gearmotors with a precision planetary gearhead.
• High efficiency design
• Silver precious metal commutation
• Precision planetary gearhead
• Low Noise
• High torque
• Low weight
As the name suggests, brushless motors have no brushes, instead, permanent magnets are mounted around the perimeter of the motor. This eliminates the need for commutators and connections, as well as brushes. Brushed motors are simple and lower cost but require more maintenance as the brushes need regular cleaning and replacement. Brushless motors on the other hand tend to be more accurate for applications that require controlled positioning and have the added benefit of requiring little or no maintenance. This comes at a price however, as brushless motors cost more to manufacture and require a motor controller which could cost as much as the motor itself.
RS Brushless DC Motors
RS Stock # 536-6024
 From RS Pro, this brushless DC motor is ideal for a variety of applications. With a sturdy construction from high quality materials, the DC motor delivers efficient power and consistent torque output.As the electric motor is brushless, it uses hall effect sensors to monitor the rotor position and control speed, ensuring greater reliability and efficiency.
From RS Pro, this brushless DC motor is ideal for a variety of applications. With a sturdy construction from high quality materials, the DC motor delivers efficient power and consistent torque output.As the electric motor is brushless, it uses hall effect sensors to monitor the rotor position and control speed, ensuring greater reliability and efficiency.
Features and Benefits
• Hall effect sensors with 120° electrical angle
• 8mm Shaft Diameter
• Speed control feedback via hall sensors.
• Class B insulation
• Metal Core
From cordless power tools to industrial automation and from electric bikes to remote-controlled ‘drones’, an increasing number of motion control applications are now being built around the brushless DC (BLDC) motor. While BLDC solutions require more complex drive electronics than brushed alternatives, these motors offer a number of operational advantages that include higher efficiency and higher power density. This allows smaller, lighter and less expensive motors to be deployed. At the same time, there is less mechanical wear-and-tear, which leads to higher reliability, longer lifetimes and eliminates need for ongoing maintenance. BLDC motors also operate with lower audible and electrical noise than their brushed counterparts.
AC motors can also be categorized into two main types: Induction and Synchronous; with a third, less common type – Linear AC motors.
At a very basic level, AC motors consist of two primary parts: the outside part of the motor is known as the stator – the stationary part of the motor – which has coils that are supplied with alternating current to produce a rotating magnetic field; inside the rotor conects to a shaft which produces another rotating magnetic field. Linear motors are similar in principle to rotating motors but are configured with moving and stationary parts in a straight line – ultimately, instead of rotation, this produces linear motion.
Induction motors are named as such because torque is produced using electromagnetic induction. These are commonly known as squirrel cage or wound rotor motors.
Synchronous motors differ from induction motors in that they operate in precise synchronization with line frequency. In contrast, induction motors rely on inducting current to produce magnetic field and require some ‘slip’ (slightly slower rotations) to actually induce current.
 AC Synchronous Motors
AC Synchronous Motors
Johnson Electric 53465 Clockwise Synchronous AC Motor, 0.5 W, 1 Phase, 12 Pole, 230Vac, Clip Mounting
RS Stock # 455-2527
Mfr. Part # 53465
These synchronous motors are for direct driving from an a.c. supply. Ideally suited for time driving in instrumentation, machine and process control. The smaller units can be directly connected to the synchronous gearboxes.
What to look for when choosing a motor
 When selecting a motor there are a number of key attributes to look out for:
When selecting a motor there are a number of key attributes to look out for:
Speed: What speed do you need the motor to run at? This will determine your required speed control type. Do you need a range of ramp up times?
Torque: Is a measure of the rotational turning force usually measured in Nm (newton metre)
Integral gearboxes: Integral gearboxes work to reduce speed and increase torque.
Power requirement: What power rating do you need? Is it for full load, normal load or light load?
Power rating: Generally rated in watt (W) or horsepower (hp). Check normal operation and overload ratings.
Supply: Check power supply requirements: voltage and current or specific controllers.
Mechanical configuration: Motor size and dimensions will be dictated by the application it is for. Overall size, shaft size, mounting points and weight all need to be considered.
Motor Control Architecture
 Motor Control Systems
Motor Control Systems
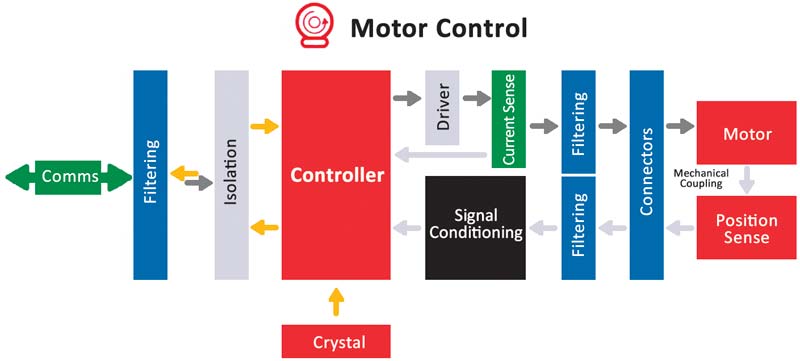
The diagram shows the building blocks of a typical motor control system depending on the type of motor, application, level of control and, if any, monitoring that is required.
Controller – Typically a microcontroller or DSP. This takes commands such as direction, speed and torque, which it uses to generate one or more signals to drive the motor, usually PWM. The controller may also be provided with feedback in the form of current and position sensing, in order to provide more accurate control, motor protection and failure detection.
Driver – More often than not a driver is required to amplify the signals generated by the controller in order to deliver sufficient power to the motor.
Sensors – A shunt or hall effect device may be used to measure the actual current supplied, thereby providing feedback. Actual motor position feedback may also be provided via an inductive or hall effect sensor, or encoder. This feedback can then be used to implement more sophisticated “closed loop” control providing actual information around the motor to better control the output.
Filtering – Filtering is generally employed at numerous points within a motor control system to suppress sources of EMI. Types of filtering include ferrite cores and inductors.
Isolation – Galvanic isolation is generally used to isolate the motor controller from the rest of the system, which may be sensitive to transients and could also be at a different earth potential.
Author: Bogdan Grămescu